磁悬浮列车运行控制系统仿真
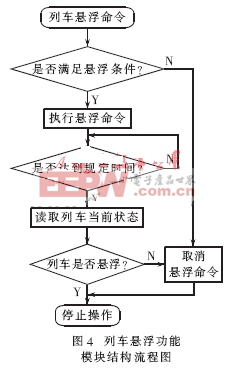
列车控制系统环境仿真机主要接收来自VSC的控制命令并执行相应的操作。环境仿真机每执行一个控制命令就对应着一个功能模块,主要包括列车的启动及停止、紧急停车管理、改变运行模式、列车悬浮、辅助控制面板、涡流制动、监督车辆控制装置、车门监督等。本文仅给出了环境仿真机中的列车悬浮功能模块结构流程图。列车的悬浮必须满足三个条件:有足够的安全定位信息,没有紧急停车信号和分区控制子系统工作正常。列车悬浮功能模块的结构流程如图4所示。
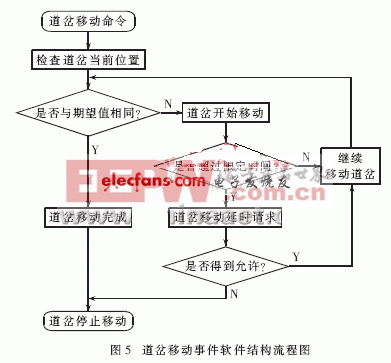
(3)道岔系统环境仿真机中的软件结构
道岔系统环境仿真机收到DSM的道岔移动命令后开始移动道岔并将执行后的结果发送给DSM.道岔移动事件的软件结构流程如图5所示。
3 结 论
系统采用一般的PC机作为环境仿真机,通过通信链路的双路冗余方式以及数字信号的动态输入输出方式提高磁悬浮列车运行的安全性,并得出以下结论:
(1)以太网和串行通信本身不具备安全性,应用到运行控制系统中必须采取特殊的安全措施以保证数据传输的安全。本实现方案采取了增加冗余通道和对报文进行安全处理等方法来保证磁悬浮列车运行控制系统通信链路的安全性。
(2)采用动态的输入输出信号,避免电子器件发生故障时导致的固定的0或1输出对系统安全性的影响,保证了信号传输和系统控制的安全性。
(3)仿真环境中牵引供电系统环境仿真机、道岔系统环境仿真机和列车控制系统环境仿真机的硬件可采用普通的PC机来实现,其接口满足环境仿真的需要。
(4)各环境仿真机的软件结构设置应尽量反映真实环境的情况。在设计中综合考虑了系统的安全处理,采取相应的安全措施,使得整个系统满足高安全性的要求。















评论