基于AT89S52的MEMS陀螺信号采集与处理系统设计
3 测试结果
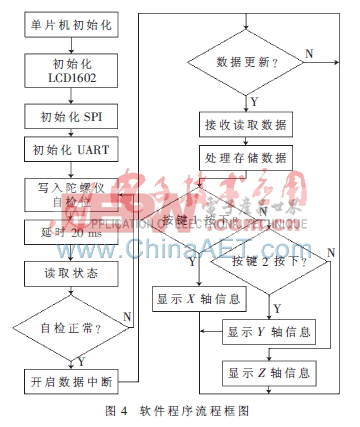
完成硬件平台搭建和软件程序设计后,室温下对系统进行静态测量,通过改变温度,分析角度的漂移;在小型旋转平面上进行动态测试,分析线性加速度的变化,针对过大的漂移率现象,进行自校准,再测量。
静态测试,在室温下,由液晶屏显示输出温度为
+21.36 ℃,输出角度有不超过0.02°/s的漂移率。当把陀螺仪温度提高到50 ℃时,显示温度为+50.07 ℃,陀螺角度出现单向漂移现象,输出角度大约为0.72°/min漂移率。经过软件自校准后,角度漂移较稳定变化,单漂移现象消除。
动态测试,对三轴加速度计的测试采用重力场1 gn试验方法[8],安装方法如图5所示,将加速度计通过卡具安装在位置转台上,使加速度计的输入轴在铅垂平面内相对重力加速度转动。

使位置转台在360°范围内旋转,由图5可知,敏感轴上的加速度分量为[9]:
a=gn·sinθ (1)
式中a为敏感轴上的加速度;θ为加速度计敏感轴与水平方向间的夹角。由式(1)可知,当位置转台转动时,加速度计敏感轴上的重力加速度分量呈正弦关系变化,加速度计的输出也呈正弦关系变化。在知道敏感轴与水平方向的夹角后,就可以计算出加速度计所感应到的加速度大小[8]。
测试采取十二位置测试方法,即每间隔30°测量一次,首先需要确定机械零点,即试验前要确保初始状态的敏感轴与水平方向间夹角为0°,确定机械零位一般采用四点法[9],测量当地重力加速度gn(如长春重力加速度为9.801 m/s2),由公式(1)可以计算出十二位置点的重力加速度分量值,选取部分测试点与本系统显示的加速度值对比,分析绝对误差如表1所示。

由表1知,在常温下测量的ADIS16355加速度计 系统显示的值与理论值绝对误差在转台限定的误差范围之内,并且满足ADIS16355线性加速度精度误差为2.522 mg/LSB(约为0.024 7 m/s2)的要求,加上温度补偿可以进一步提高测量精度。
本数据采集系统主要存在以下误差:一方面是由陀螺仪自身出厂工艺缺陷、结构、工作模式等形成的各种漂移;另一方面是由重力场、磁场、检测电路干扰、系统安装不平衡引起的陀螺输出偏差。对于以上误差中确定性误差可以采用标定测试、自检校准和温度补偿来减小,对于不确定性误差采用统计方法统计变化规律和有效系统辨识方法来处理。
ADIS16355 iSensor是一款完整的三轴陀螺仪与三轴加速计惯性检测系统。本文以AT89S52单片机为核心控制器件,只需要很少的外围电路,采用KeilC51软件编写程序,实时存储采集的数据并经LCD显示,通过静态温度和角度测试及重力加速度试验测试表明,该系统具有较高的精度和实时性。最后对系统存在的误差进行分析。本文设计的MEMS数据采集系统具有精度高、成本低、操作简单、使用方便,在陀螺仪的实际应用中存在较大的市场价值。
参考文献
[1] 陈国华,王刚. 基于ADIS16255 MEMS芯片陀螺仪的应用研究[J].中国惯性技术学报,2008,16(4):480-483.
[2] 李朝青.单片机原理与接口技术[M].北京:北京航空航天大学出版社,2003.
[3] 8-bit microcontroller with 8 K Bytes in-system programmable Flash.AT89S52 datasheet. Micro- controllers.2008,[2011- 01-06].http://www.atmel. com/dyn/resources/prod_documents/doc1919.pdf.
[4] 陈宝毅.MEMS惯性器件的数据采集与误差分析技术研究[D].哈尔滨:哈尔滨工程大学,2009.
[5] Programmable low power gyroscope,ADISl6355 datasheet. ANALOG DEVICES.2007,[2011-01-06].http://www.analog.com/pr/ADIS16355.
[6] 王模袁涛,谭涛.基于MEMS陀螺仪的微惯性测量系统的实现[J].微机电(MEMS)技术应用,2008,24(9):152-153.
[7] 陈小忠,黄宁,赵小侠.单片机接口技术实用子程序[M].北京:人民邮电出版社,2005.
[8] 李振波,李疆,刘北英.基于单片机的数字微加速度计静态测试平台设计[J].传感器与微系统,2008,28(2):88-90.
[9] 董景新.微惯性仪表-微机械加速度计[M].北京:清华大学出版社,2003:227-265.















评论