嵌入式组合控制直线一级倒立摆系统
K=[-3.1623 -3.7134 31.1664 5.718 3]在线仿真的实时小车位置(单位:m)、摆杆角度(单位:(°))和干扰变化波形如图4所示。本文引用地址:http://www.eepw.com.cn/article/149185.htm
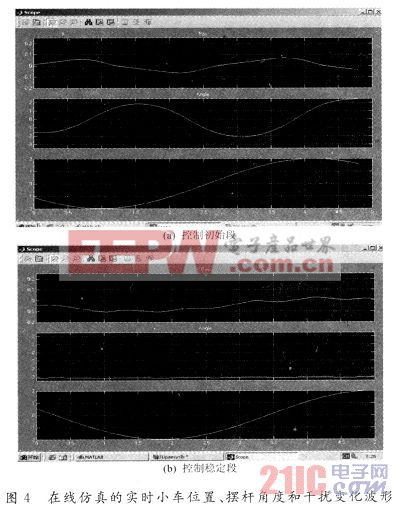
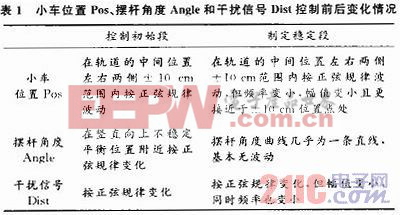
嵌入式组合式控制器控制过程中小车位置Pos、摆杆角度Angle和干扰信号Dist的在线仿真响应波形变化情况分析如表1所示。结果表明本文提出的嵌入式组合式控制算法对直线单级倒立摆系统的控制正确、有效。能够达到自动和安全的控制效果,满足系统的设计要求。
4 结论
本文根据线性系统理论、最优控制理论和自动控制原理没计了组合式控制器,其可行性和有效性在单级直线倒立摆系统上得到了验证。该控制器具有简单、直观和易于实现的特点。只要摆杆的初始角度在±20°范围内,嵌入式组合控制器都能使倒立摆控制系统保持稳定的倒立平衡状态。本文建立的实验平台也可作为控制系学生的《自动控制原理》课程设汁实验及考核平台。








评论