嵌入式组合控制直线一级倒立摆系统
2 嵌入式组合控制器的设计
2.1 系统能控性分析
被控系统状态完全可控性矩阵Uc=[B AB A2BA3B],通过计算可得rank(Uc)=4,即矩阵Uc的秩等于系统状态变量维数;被控系统输出完全可控性矩阵Uo=[CB CAB CA2B CA3B D],求得rank(Uo),即矩阵Uo的秩等于系统输出向量维数。所以系统可控,可以对系统进行控制器设计,使系统稳定。
本文所使用的控制器是由自动起摆控制器Swingup Controller、线性二次调节器LQR Controller和学生设计的控制器Controller1组成的嵌入式组合控制器。在Simulink中搭建直线一级倒立摆嵌入式组合控制系统,如图2所示。本文引用地址:http://www.eepw.com.cn/article/149185.htm
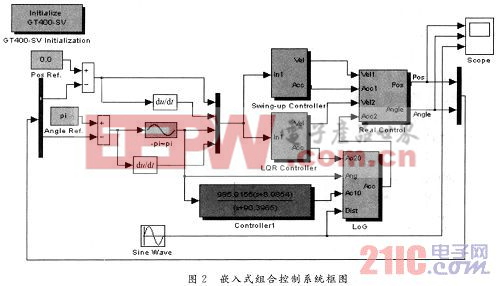
自动起摆控制器Swing-up Controller能够控制直线一级倒立摆由静止下垂的稳定平衡状态自动转化到竖直向上的不稳定平衡状态,而无需给摆杆施加力的作用,就可以实现摆杆的自动摆起。
2.2 LQR控制器原理
针对线性系统的状态方程![]() 和输出方程y(t)=Cx(t)+Du(t),LQR方法通过确定最佳控制量u(t)=-Kx(t)中的矩阵K,使得控制性能指标
和输出方程y(t)=Cx(t)+Du(t),LQR方法通过确定最佳控制量u(t)=-Kx(t)中的矩阵K,使得控制性能指标![]() 取极小值。其中,x是状态向量;u是控制向量;R为正定厄米特或实对称矩阵;Q为正定或半正定厄米特或实对称矩阵。参数R和Q分别用来平衡输入量和状态量的权重。
取极小值。其中,x是状态向量;u是控制向量;R为正定厄米特或实对称矩阵;Q为正定或半正定厄米特或实对称矩阵。参数R和Q分别用来平衡输入量和状态量的权重。
2.3 系统的结构
系统主要由被控对象、起摆控制器、LQR控制器、学生控制器、位置给定器、角度给定器、运算器和扰动信号发生器等构成。整个系统是在固高公司提供的直线单级倒立摆控制系统基础上,设计逻辑切换单元(LOG),把学生控制器嵌入系统中,形成嵌入式组合控制的倒立摆控制系统。








评论