系统软件结构如图4所示。本文引用地址:http://www.eepw.com.cn/article/149116.htm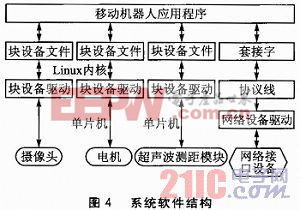
系统驱动程序利用MINI2440开发板提供的例程进行改写,并编译进内核。
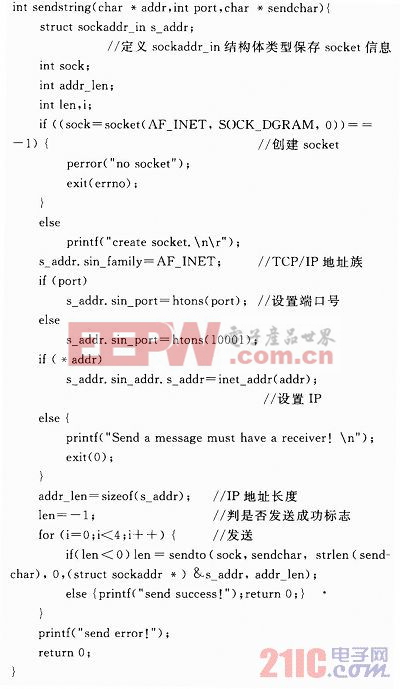
摄像头控制软件mjpg-strearner由OpenWrt以软件包形式提供,通过端口8080输出为MJPEG格式的图像。无线通信部分内容为Linux下socket编程,为客户端提供远程控制支持。无线通信的部分代码如下:
51单片机相关文章:51单片机教程
路由器相关文章:路由器工作原理
路由器相关文章:路由器工作原理











评论