一种快速的公交专用车道检测方法
本文通过对车辙印记以及车道线边缘等一些纹理特征进行分析,从而提取出道路的消失点以及车道线的信息。
Gabor滤波器的模板计算方程如式(2)所示,该模板分为实部(式(3))和虚部(式(4))两部分。
通过建立K×K 大小的Gabor 模板,(x,y) 表示图像空间的一点。其中,θ 表示模板的方向, 为确定最后的道路纹理方向, 这里选择范围为0~72 ;λ 表示路面的波长;σ表示噪声容量, 本文取σ=K/9 .
3.2 消失点的求解
本文用不同方向的模板与图像进行卷积, 对于图像任意一点, 即可得到某一个方向上的卷积的结果为最大值, 这个最大值为纹理方向对应的能量, 该方向为纹理的方向。

其中,α 表示模板对应的方向, 对于图像中的任意点I(x,y) 与α 方向的Gabor 模板进行卷积, 得到不同的t(x,y),求取其最大值, 将最大值对应的方向作为图像中(x,y)点的纹理方向, 同时将该最大值作为纹理方向上的纹理强度。
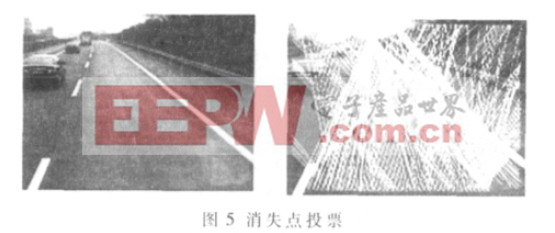
通 过计算可以得到图像中每一点的纹理方向以及能量。为了计算出消失点, 对图像中选取的点进行投票,这里选择图像下方一定的区域点, 如图5 所示。当纹理能量大于设定阈值的点作为投票点,p 表示图像中投票空间的点,θ (p) 表示p 纹理方向,v 表示消失点的候选点,a (p ,v) 表示p 点与v 点的夹角,n 为采用的Gabor 模板方向的个数,R 为定义的投票空间, 即图6 对应的方框区域, 通过vote (p,v) 来统计p 点对v 点的投票结果,votes (v ) 为对R 区域累加进行投票的统计结果,pvote 为最终被投票次数最多的点的坐标, 即消失点。


图6 中的框表示选取的投票区域, 即在该区域内选取400 个点进行Gabor 变换, 求出其纹理方及能量; 圆圈是求出的消失点位置。

对于传统的Hough 变换, 需要对每个点每个角度进行遍历, 这样比较耗时。本文采用改进的Hough 变换, 对消失点及其周围的有限个像素进行Hough 变换, 求取左右车道线的两个峰值点,并绘制出车道线。该方法能够有效地抑制图像的其他边缘噪声干扰,提高算法的实时性。车道检测结果如图7 所示。

3.4 车道线跟踪
跟踪分为消失点的跟踪和车道线的跟踪。
(1) 消失点的跟踪: 消失点一般较远, 车辆在行进过程中消失点范围变化不是很大,而靠近车道线的道路两边由于车辆轮胎接触较为频繁, 纹理较为明显, 对消失点的贡献较大。因此, 随机选取靠近车道线两边100 个点对消失点及其周围的若干个点( 本文选取36 个点) 进行投票,如图8 所示。
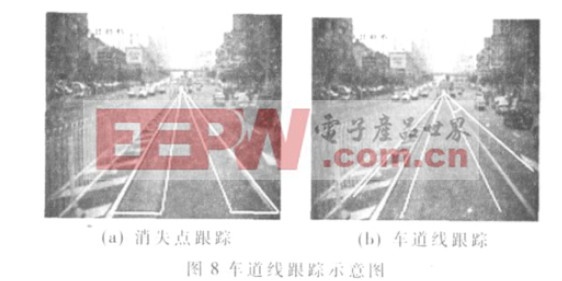
(2)车道线跟踪:根据上一帧测量的结果,限定角度在一定变化范围内(本文限制在10°范围,如图8(b)所示)进行Hough变换,这样大大减少了运算速度。当图像检测的消失点及车道线上的点少于所设定的阈值时,程序重新初始化。
4 车道识别
本文在应用的基础上对合肥以及沈阳的BRT车道进行统计,其BRT车道相对其他车道具有如下特点:其左右车道线都为黄色,一般位于路的两边,道路的两边有栏杆或者路牙等特征。基于此特点,本文实现了BRT车道的识别系统,结合GPS判断其所在位置范围内有无BRT车道,若有则判断车道线颜色是否为黄色,即建立颜色模型,对车道线上的每一点颜色进行标记,并综合判断其左右车道线是否是黄色车道线,对黄色进行标记,如图9左图所示。由于车道线长期受到磨损有一定的失真,且在晚上黄光灯照射下不易准确地识别颜色,本文结合其栏杆、路牙等特征识别车道,对检测的车道线两边的一定区域(图9右图白色矩形区域)进行对比,比较其颜色边缘纹理等特征差别。通过大量的测试,本文得到了判断其是否为BRT车道的先验阈值,当矩形区域差别大于设定阈值时,则判断为公交专用车道,从而准确实现车道检测。

5 实验结果与分析
实现BRT 车道识别的具体流程如图10 所示。
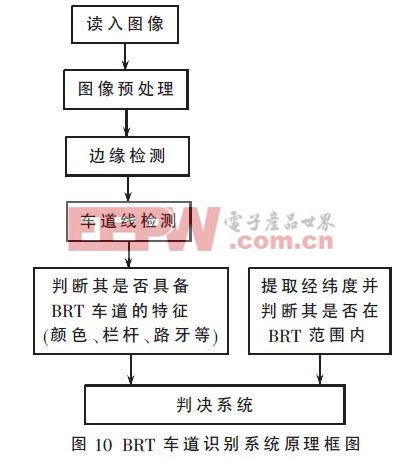
本文首先通过GPS采集车辆所在区域的经纬度信息, 并建立道路经纬度信息库判断车辆所在位置附近是否具备BRT专用车道,若有,则进行车道线检测,找到车辆所在车道的左右车道线,并判断车道线上颜色信息以及车道线左右的边缘亮度等信息,分析其是否具备BRT快速公交车道的特征,如具备,则可以作为监控前方车辆是否违规驶入BRT车道的一个依据。















评论