基于DSP的无刷直流电机控制器设计与实现
2 系统构成
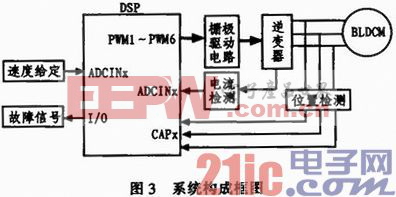
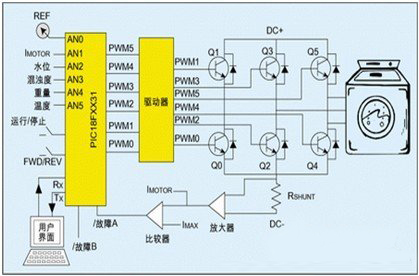
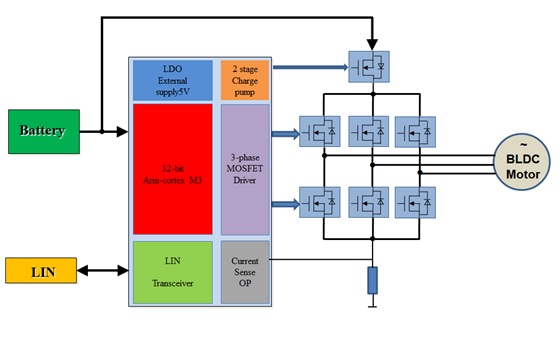
图3为系统构成框图。控制器采用高性能的数字信号处理器TMS320F2812作为控制核心,电流采样及位置检测采用了芯片内置模块,实现了高度的集成化;以高精度霍尔传感器作为系统位置反馈元件;以高精度检测电阻作为电流反馈元件;构成数字化速度和电流双闭环控制系统。考虑到电机PWM驱动信号的载波频率比较高,功率模块选择了MOSFET开关管。
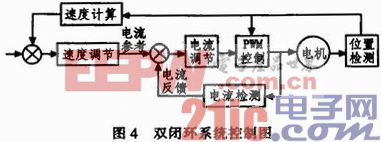
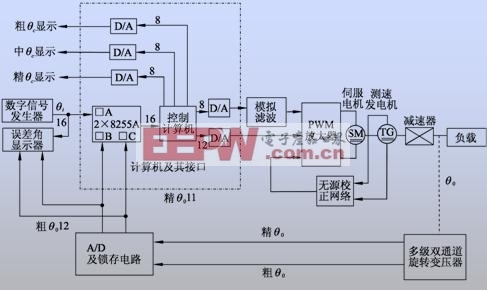
由图4可以看到这是一个典型的双闭环调速系统,包括一个速度调节环和一个电流调节环。首先根据检测到的转子位置信号,计算得到电动机的当前转动速度,然后与速度参考值比较得到速度偏差值,经过一个PID控制器后得到相应的电流参考值。该电流参考值与实际的电动机的电流反馈值进行比较,偏差的值经PID调节后将生成的PWM信号加到电动机的功率驱动主回路上。通过控制功率管的开通顺序和时间,可改变电动机定子绕组中的电流大小和绕组的导通顺序,从而实现对直流无刷电动机转速的控制。
3 系统各模块实现
3.1 电流的检测和计算
电流的检测是采用精度较高的检测电阻来实现的,将检测电阻串联接到直流母线中。电阻值的选择考虑了当过流发生时能输出的最大电压。
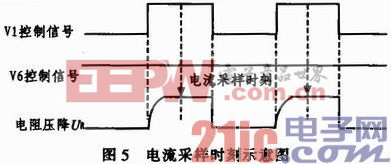
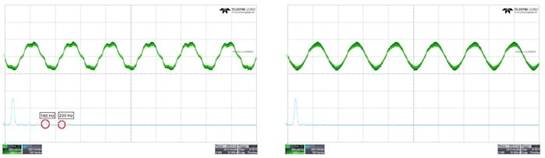
每—个周期对电流采样一次。本设计中PWM周期为50μs,则电流的采样频率为20 kHz。开关管采用PWM控制,载波为三角波。在PWM周期的“开”的瞬间,电流上升并不稳定也不易采样。所以电流采样时刻应该是在PWM周期的“开”的中部,如图5中的箭头即为电流采样肘刻。电流采样通过DSP定时器采用连续增减计数方式的周期匹配事件启动ADC转换来实现。
3.2 位置检测和速度计算
无刷直流电机需要不断地对三相无刷直流电动机进行换向。掌握好恰当的换相时刻可以减小转矩的波动。因此位置检测是非常重要的。同时通过位置检测信号计算出当前电机的速度数据。
位置信号是通过3个霍尔传感器得到的。每一个霍尔传感器都会产生180°脉宽的输出信号,3个霍尔传感器的输出信号有120°相位差。通过将DSP设置为双沿触发捕捉中断功能,就可以获得这6个时刻。通过将DSP的捕捉口CAP1~CAP3设置为I/O口、并检测该口的电平状态,就可以知道每个霍尔传感器的电平状态从而得到当前转子的位置。
利用位置信号来计算电机当前的转速。电机每个机械转有六次换相,也就是转子转过60°机械角就有一次换相。通过DSP的定时器测得两次换相的时间间隔,就可以计算出两次换相间隔期间的平均角速度。
3.3 其他系统模块的设计
本系统中电机的转速设置有两种方式,一种是采用电位计分压的方式,由于DSP2812的A/D模块的电压采样范围是0~3.3 V,所以电位计供电也为3.3 V。另外一种方法是采用DSP2812内置的SCI模块与上位机PC端进行通讯,通讯方式采用RS485通讯总线。RS485总线采用差分传输,抗干扰能力强、传输距离远。电流设置也采用DSP2812的A/D模块采样电位计分压的方式。

pwm相关文章:pwm是什么
脉宽调制相关文章:脉宽调制原理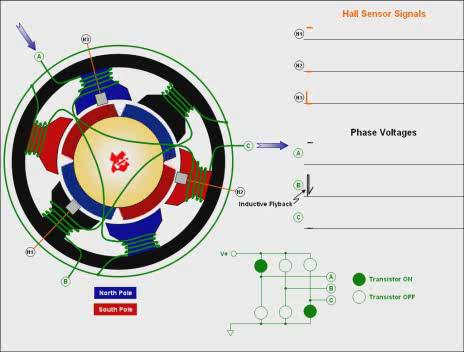






评论