基于DSPIC的工业控制系统的设计
2 控制策略和系统软件设计
2.1 电机运行的控制策略
PWM控制是直流无刷电机矢量控制系统的控制核心,任何控制箅法的最终实现几乎都是以各种PWM控制方式完成的。本系统中我们采用的是方波控制,该控制方式是以三相对称正弦波电压供电时对称电动机定子的理想磁链圆为基准,由三相逆变器不同的开关模式产生的实际磁链矢量去逼近基准磁链圆,以达到高性能的控制,同时可以较好地改善电源电压。利用效率由于该控制方法把逆变器和电机作为一个整体来考虑,因而模型构造相对简单,便于数字化实现。
如图2所示是一种典型的三相电压源逆变器的结构,逆变桥电路的电压输出分别由6个开关信号所控制。当逆变桥上半部分的一个功率晶体管开通时,其下半部分对应的功率晶体管关断。T1、T3、T5三个功率晶体管的开关状态决定了逆变器输出的相应电压的大小。本文引用地址:http://www.eepw.com.cn/article/148078.htm
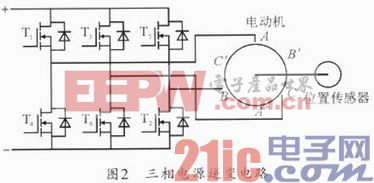
图2中,霍尔传感器在电动机转子转动一周的过程中输出6种状态。具体如表1所示。

每个状态持续π/3电角度,这样就在空间上分成6个区间,与之相对应转子在相应的区间转动,每个周期里,每个功率管导通π/3电角度。定子绕组每周期正、反导通各:π/3电角度,正、反电流间隔:π/3电角度。任一时刻定子有两相绕组通电并产生定子磁动势,随着转子位置信号的变化,定子合成磁动势以π/3为步长,步进式地旋转,转子磁场在定子磁动势的作用下与之同步旋转。
2.2 系统软件总体设计
软件设计直接影响系统的整体性能。根据DSP控制系统的开发流程,采用自顶而下的没计方法依次主要包括以下几个模块:
(1)系统初始化模块。
(2)主程序是个循环等待中断的过程,一旦有中断发生,则转去执行相应的中断服务程序。
(3)电机调速模块:根据用户设置及脚踏板的控制信号,结合改进的积分分离PI算法调节电机转速。
(4)故障处理程序:故障监视程序是保护系统安全工作比较重要的一环,一旦故障发生,立刻封锁PWM的输出,启动智能功率模块的保护。

伺服电机相关文章:伺服电机工作原理




评论