基于LabVIEW的倒车自动刹车系统开发
4.3.2 成果分析
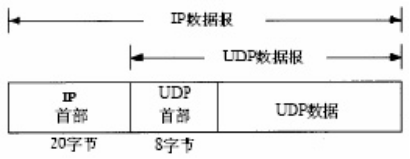
本文引用地址:http://www.eepw.com.cn/article/147867.htm报表输出功能将速度轨迹及加速度轨迹以Excel的格式输出,其结果如图16、17所示。
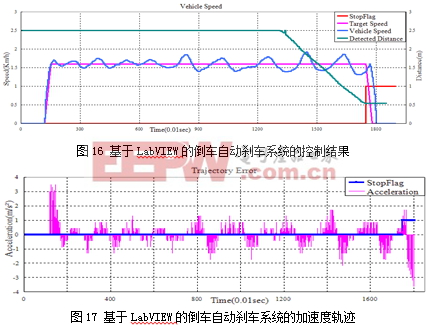
图16所示的测试结果显示实际车速轨迹与预定车速轨迹的稳态误差在-0.2Km/h到0.3Km/h之间,且车辆完全制动时车—障碍物实时距离为54cm。图17显示整个控制过程中的实时加速度轨迹,在匀速状态时的加速度均低于1.4m/s²,远小于人体舒适的加速度极限(≤2.5m/s²)。由此可知,实际控制效果已基本达到预期目标。
4.3 现场成果
本系统安装于长安志翔CV8上,车载CAN网络通过NI 8473与笔记本电脑上的LabVIEW平台实时通信。同时将超声波传感器安装于车后牌照正上方,并通过NI DAQ平台配置NI9269及NI9221的相关参数,从而驱动超声波传感器。图18为超声波传感器与相关数据采集设备的连接图,图19为现场时设备连接图。

五. 结论
从技术层面讲,NI DAQ平台和LabVIEW开发环境无缝连接使用户轻松的通过图形化开发环境访问底层硬件,快速建立系统原型和数据采集应用,大大降低了系统开发的技术风险。LabVIEW强大的数据采集和信号处理功能极大地节省了采集终端软件的开发时间,在NI DAQ平台和LabVIEW CAN模块的配合下使得采集终端能够实时并且高质量地完成数据采集、信号处理、数据传送和数据处理的工作,为整个系统的开发研究提供灵活、强大的底层硬件支持。
基于LabVIEW平台的倒车自动刹车系统已在长安志翔CV8上成功实现相关功能,该系统的成功开发在速度控制领域及相关辅助系统开发方面取得突破性进展。同时对长安汽车有限公司正在进行的全自动泊车系统的开发奠定夯实的技术基础。
加速度计相关文章:加速度计原理














评论