基于双排传感器的循迹策略研究
当然也可以采用更严格的方法来判断,只需调整定时中断的时间和计数值即可。
本文引用地址:http://www.eepw.com.cn/article/133353.htm此条件在进入直道后总能满足,所以作为第一种直道判别方式的补充,保证直道的稳定可靠识别。
直线稳定控制策略:
小车出弯后,由于舵机的反应不灵敏,智能车会发生振荡,随后才能达到稳定,为了尽早减小振荡,采用如下方式控制小车出弯后的动作:
在弯道策略中设置标志位,进入直线程序后,识别标志位,对控制舵机转向的公式采取修正设置。公式为:![]() ;其中
;其中![]() 为最终送给舵机的控制量,
为最终送给舵机的控制量,![]() 为前排光电传感器的返回转角值,
为前排光电传感器的返回转角值,![]() 为后排红外返回转角值。
为后排红外返回转角值。![]() 分别为前后排传感器的加权比例值。通常情况下
分别为前后排传感器的加权比例值。通常情况下![]() 为1,需要是则改变赋值。
为1,需要是则改变赋值。
当小车从弯道进入直道并成功识别出直道后,减小![]() 的值,由于后排传感器距离小车的前轮(转向轮)很近,小车中心偏离黑线时,不会在后排传感器横向位置产生很大位移(相对于前排传感器),故小车在直线上舵机调整的次数就会明显减少,直线的稳定性会好。同时,根据前后排不同传感器的组合,给出不同的转角策略(在程序中以列表的方式体现),近一步提高直线的稳定控制能力。
的值,由于后排传感器距离小车的前轮(转向轮)很近,小车中心偏离黑线时,不会在后排传感器横向位置产生很大位移(相对于前排传感器),故小车在直线上舵机调整的次数就会明显减少,直线的稳定性会好。同时,根据前后排不同传感器的组合,给出不同的转角策略(在程序中以列表的方式体现),近一步提高直线的稳定控制能力。
当在直线中车身倾斜时,如下图情况,前排给出的![]() 被缩小后送入舵机公式,后排给出0信号,此时舵机会向左打很小的角度,维持直线的高速稳定。
被缩小后送入舵机公式,后排给出0信号,此时舵机会向左打很小的角度,维持直线的高速稳定。
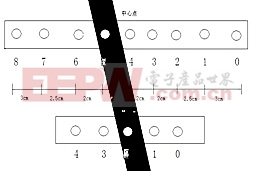 图1
图1 图2所示的车身偏移情况大于图1,虽然在纵向传感器位置上没有变化。此时前排4和后排传感器3的组合,优先满足直线控制策略中的特定条件,直接把控制量![]() 送入舵机,使舵机向右转动较小角度。
送入舵机,使舵机向右转动较小角度。
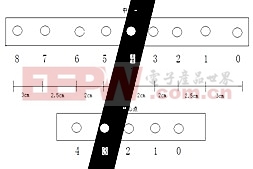 图2
图2 图3所示车身有更大的偏移,前排给出向右转的信号![]() ,后排给出信号
,后排给出信号![]() ,
,![]() 被缩小后,与
被缩小后,与![]() 相加,抵消了部分向左转的信号。最终的效果就是向左大很小的角度,维持直线的高速稳定。
相加,抵消了部分向左转的信号。最终的效果就是向左大很小的角度,维持直线的高速稳定。
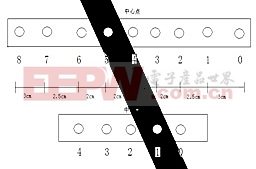 图3
图3*注:左侧传感器给出的信号为负值,右侧传感器给出的信号为正值,这样可以在公式中自然融合。
弯道识别方式、控制策略(90°弯、180°弯)
(仅以右弯作为示例)
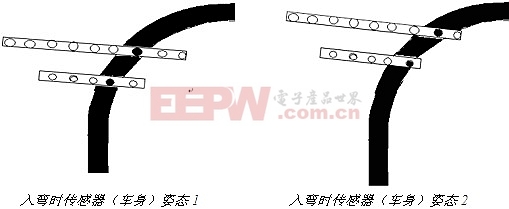
姿态1:识别为半径大于50cm的弯(即半径为100cm的弯),不触发弯道程序,舵机动作较小,达到圆滑过弯,是速度损失最小的一种状态。












评论