飞思卡尔针对无传感器双电机控制推出100MHz 32位DSC
电机驱动器是洗衣机、洗碗机、干衣机、冰箱、空调系统等家用电器的组成部分。近几年对家电电机驱动器的要求发生了很大的变化。推动这些变化的因素包括安全和环境友好要求、性能要求,以及制造成本。其中一个关键要求是实现高效率,这决定了需要使用采用先进的控制算法的高能效电机进行电机控制和家电控制。性能要求涵盖了可变的电机转速操作,并要求具有高动量和广泛的转速范围。与简单的换相控制相比,低噪声要求更倾向于正弦驱动。单相异步电机和通用电机正在被三相电机(交流感应电机、无刷直流电机以及最主要的永磁同步电机(PMSM))取代,因为三相电机能够满足上述要求。通常需要对交流感应电机或永磁同步电机进行矢量控制。矢量控制提供卓越的动态性能,可以在低速情况下利用完整的电机转矩功能,在广泛的速率范围内在每个工作点高效地控制电机,并能够单独控制电机转矩和通量。最重要的是,对统一输入功率因数的需求要求采用功率因数校正(PFC)电路。
电机驱动器的技术解决方案通常接近技术极限,在很大程度上由成本推动。电机的大小和材料成本进行了优化,通常会产生非线性电机参数,会随着电机温度和电流而变化。电子硬件尽可能保持简单;设计人员通常不会使用昂贵、精准的模拟元件,而实施专用软件算法。位置或速度传感器相当昂贵,因此开发人员侧重于实现无传感器的操作,采用先进的数学估算方法,根据外加电压计算电机速度和位置,生成电流和电机参数。因此,电机控制不再是一种简单的算法,而成为一个复杂的系统,需要带有专用外设的高性能微控制器和先进的电机控制算法。
一些家电包含一个以上的电机。洗衣机就是一个例子,它有一个水泵和主驱动器,空调则包括压缩机和风扇。过去,这些电机由单独的电子电路驱动。然而,为了实现最低的成本,出现了使用一个单一微控制器并行控制两个电机的驱动器,从而最大限度地减少昂贵电子元件的数量。
通过推出集高性能、专用外设和低成本于一身的专用微控制器,将能够同时实现高效率、高性能和低廉的成本。飞思卡尔提供了完整的数字信号控制器(DSC)系列,能够满足先进的电机控制应用的要求。DSC系列提供了用于数字电源转换、电机控制以及其他需要高速率和高分辨率控制环路功能的应用的优化解决方案。DSC系列结合了数字信号处理器(DSP)的处理能力和微控制器功能以及一组灵活的外设,实现了经济高效的解决方案。DSC系列最先推出基于16位56800E内核的32MHz MC56F80xx器件,主要针对复杂驱动器,如针对泵、风扇、压缩机的无传感器矢量控制;接着推出了60MHz DSC,针对无传感器洗衣机等要求苛刻的应用,最新推出的是基于32位56800EX内核的100MHz 56F84xx DSC,它专用于数字功率转换和无传感器双电机控制。
100MHz 32位MC56F84xx是市场上速度最快的数字信号处理微控制器,提供卓越的精度、传感和控制,用于最高效的数字功率电源转换和先进的电机控制应用。100MHz / 100MIPS 32位56800EX内核提供高级电源和电机控制应用所需的数学功能。单周期数学运算、分数运算支持和平行移动提高了性能,推动实现更紧凑、更快的控制环路。MC56F84xx包含专用于实时应用的先进的高速、高精度外设。具有312微微秒分辨率的高分辨率脉宽调制(eFlexPWM)模块支持更高的交换频率,能够降低成本,提高效率。另一个PWM模块支持实施双电机控制。两个12位高速模数转换器(ADC)提供高达300ns/3.33Msps的采样频率,减少了输入值的抖动,从而提高了系统的准确性。具有内置温度传感器和带隙的16位SAR ADC用于一般的应用测量。4个模拟比较器具有集成的6位数模转换器(DAC),可加快系统事件识别,能够在紧急情况下停止PWM输出。多功能定时器允许单独定时和生成PWM信号,可编程延迟模块(PDB)用于实现与PWM脉冲同步的硬件ADC触发,最终实现电机电流重建。正交解码器模块对常用于工业电机控制驱动器的正交编码器位置信号进行解码。64KB到288KB的闪存提供了主要数字功率和电机控制应用所需的可扩展性。直接存储器存取(DMA)控制器减少了内核中断,提高了性能。飞思卡尔FlexMemory EEPROM提供了一个高速暂存存储器(scratch pad),用于存储校准和停机值。内存保护功能能够限制用户代码访问重要的内存位置和为监控人员预留的外设,从而提高了系统安全性。5V容错I/O提供了设计灵活性和系统成本节省。包括QSCI、QSPI、I2C/SMBus和FlexCAN在内的丰富的通信外设允许与主从系统进行各种连接。模块间交叉开关是一种独特的外设,提供片上外设之间的通用连接:这些外设包括ADC、12位DAC、比较器、QuadTimers、eFlexPWM、PDB、EWM、正交解码器、特定I/O引脚。
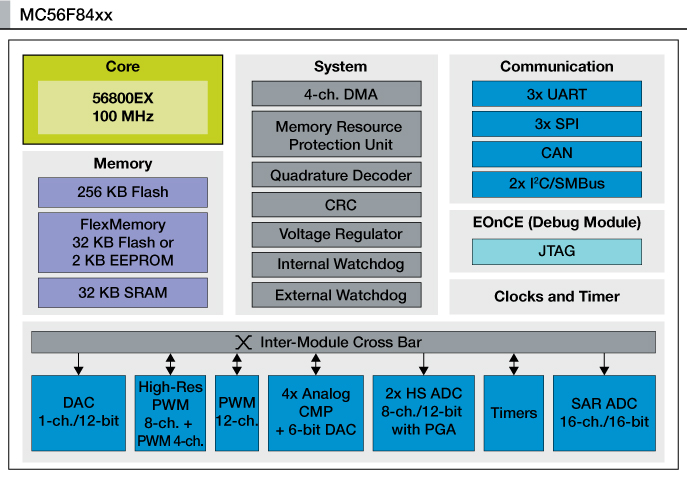
图1 MC56F84xx框图
具有功率因数校正的无传感器双正弦矢量控制是56F84xx的目标应用之一。该应用常见于洗衣机中,洗衣机有一个DSC控制泵和主驱动器,或者也常见于室外空调,其中有一个DSC控制风扇和压缩机。
此类系统的应用需求如下所示:
•对永磁同步电机进行双重控制
•同时对两个电机进行正弦矢量控制(也称为磁场定向控制-FOC)
•无传感器电机位置估算
•高启动转矩,宽转速范围
•8-16kHz的PWM频率
•使用分流电阻的三相电流传感(在某些情况下,可首选直流总线上的单一分流传感),直流总线电压传感
•输入功率因数校正(取决于地区和总功率)
•硬件和软件故障保护
•与主从系统的连接
•满足IEC60730电器安全标准
该解决方案的概念如图2所示。一个单一的DSC控制整个系统–两个电机、PFC,提供了连接,还提供了电器自身的应用控制。电源硬件包括共用直流总线电路的两个逆变器、PFC电子元件、电流和电压传感以及辅助电源。
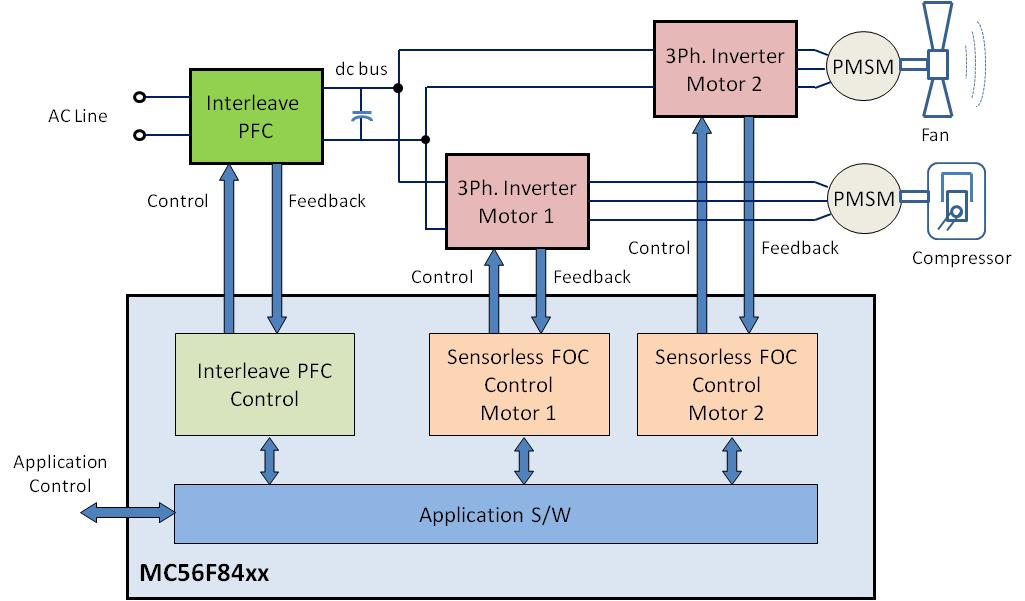
图2 由MC56F84xx驱动的PFC的双电机控制
如上所述,在目前的电器中,高级电机控制算法通常基于矢量控制技术-参见图3。使用矢量控制算法,交流感应电机和PM同步电机的控制流程类似于单独使用的直流电机的控制。在特殊的参考坐标系中,定子电流可以分为由转矩生成的电流和由磁场生成的电流。这些电流通过直流值表示,可以单独进行控制。
矢量控制算法要求使用高速ADC测量三相电流。电流测量必须与PWM脉冲中心同步,以避免转换噪声,并得到一个有意义的平均电流值。通常情况下,两相电流将同时进行测量,第三相电流通过计算得出。因此,DSC能够一次对两个电流进行采样,与PWM保持同步。三相电流被转换为循环的d/q坐标,其中可以单独控制转矩生成的电流和磁通生成的电流。控制系统包括两个电流控制环路-一个用于转矩(由q控制器表示),另一个用于磁场-磁通(由d控制器表示)。根据这些控制器的结果,使用空间矢量调制技术计算出输出电压矢量,并生成对应的逆变器的补充PWM信号。如果电机速度超出了额定值,则必须包括一种特殊算法,能够支持在磁场削弱区域运行。即便如此,一些电机仍然具有强大的磁阻转矩。为了使用这个磁阻转矩并构建尽可能小(且便宜)的电机,开发人员实施一种称为最大转矩电流比控制(MTPA)的特殊算法,该算法可充分利用磁阻转矩。MPTA还提高了效率。单独和独立控制由转矩和磁通生成的电流将实现高度动态的运行(可实现非常低的速度)和良好的控制。
要实现适当的功能,矢量控制算法需要提供位置和速度信息。在工业驱动器中,该信息通常从机械位置/速度传感器获得,例如编码器、解析器、SinCos甚至位置霍尔传感器。对于目前的大多数电器驱动器来说,机械传感器过于昂贵。在某些情况下,由于泵或压缩机内的机械限制,甚至很难使用传感器。因此,电机位置和速度必须通过先进的无传感器算法计算得出。对于永磁同步电机的无传感器位置计算,最有用的算法是基于电机的反电势(Back-EMF)数学模型的计算。反电势数学模型需要相应的电机参数、外加电压和电机电流。在运行时,DSC将解析方程组,运行数字滤波器和估算器,并计算正确运行矢量控制算法所需的位置和速度。由于该模型基于电机反电势电压,而这种电压在速度为零时会消失,显然,该方法在速度为零或低速情况下无法提供位置和速度信息。因此,该方法需要一个专门的启动算法-在通常情况下,是带有某种转矩和电流限制的开环启动。
所有这些算法的计算都需要处理器提供较高的计算能力。要求最苛刻的是矢量控制算法的快速控制环路,其中包括相位电流重建、电流转换成旋转坐标计算、电流控制器、空间矢量调制以及带有位置和速度估算器和过滤器的全反电势观测仪。快速控制环路的计算必须与PWM频率同步,通常在每个PWM脉冲上运行-对于8-16kHz PWM是63-125微秒的周期。
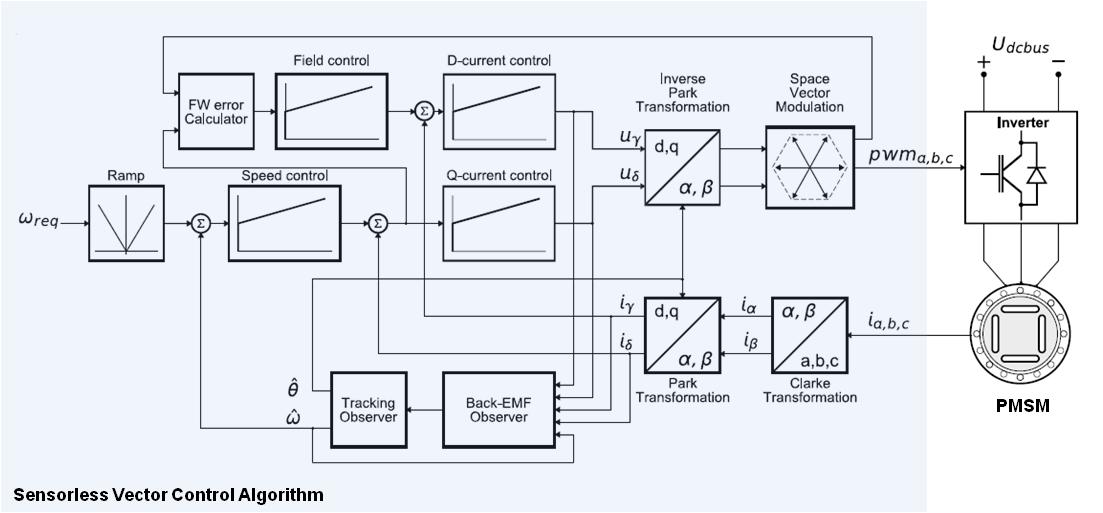
图3 永磁同步电机的无传感器矢量控制
双电机控制需要并行计算两个矢量控制算法。通常情况下,这两个电机共享一个逆变器直流总线电路。为了减少直流总线电容的电流应力,并实现最小的直流总线电压纹波,这两个电机的PWM脉冲每经过半个PWM周期就互相进行转换。这种PWM转换允许实现交替的ADC采样,因此两个ADC转换器便足够了。然后,每个电机的无传感器矢量控制算法的快速环路计算也可以交替进行。
作为一种可选方法,也可能需要用到功率因数校正(PFC)。根据性能要求、输出功率和负载条件,可以实现若干种PFC技术。对于双电机运行常见的高功率,通常使用在连续传导模式下运行的交错式PFC。交错式PFC包括两个MOSFET电源开关和两个PFC感应器。微控制器感应输入电流并控制电源开关,以保持输入电流为正弦并与电网同步。PFC的典型PWM频率范围是50-100kHz。
先进的电机控制算法需要专用的外设功能和微控制器的CPU性能,以便同时管理两个电机和PFC。除了这些任务外,微控制器应提供至少50%的计算时间用于执行与其他应用有关的任务。飞思卡尔MC56F84xx能够满足各方面的应用要求,是此类高级应用的理想选择。
要实现成功的应用开发,非常重要的一点是具备DSC生态系统,使开发人员能够在合理的时间内设计出复杂的驱动器。除了编译器、调试器、专门的应用说明和参考设计等标准工具外,飞思卡尔还提供了两个能够立即引起开发人员兴趣的工具,即FreeMASTER实时调试器和嵌入式软件库(Embedded Software Libraries)。
FreeMASTER是用户友好的实时调试、监控和数据可视化工具。电机控制应用代表一种实时的嵌入式应用,具有许多系统变量和控制参数。需要实时观察和评估这些参数及变量,从而以最佳的方式确定、建立和调整控制算法。过去,开发人员使用代码调试器和示波器来开发电机控制应用。这种传统型开发非常费力。调试器通常不允许在运行时查看和更改应用变量,需要停止目标处理器才能访问这些变量。这种方法不适用于电机控制应用,开发人员不能关断电机来访问处理器的内存,然后再次运行电机。使用示波器的限制因素是驱动器的实际信号通常与处理器测量的信号不同。测量的信号会受到所使用的传感电路、测量噪声以及模数转换器的偏移和增益误差等因素的影响。信号过滤会影响测量精度。使用示波器查看内部变量也受到很大的限制。
FreeMASTER实时调试器旨在简化电机控制应用的开发。FreeMASTER支持以完全非侵入式的方式监视嵌入式系统上运行的变量。嵌入式系统开发人员可以在类似于示波器的显示器上显示随时间变化的多个应用变量,或以文本形式查看数据。用户还可以从PC主机上控制在目标系统上运行的嵌入式应用。基于HTML的数据可视化区域具有高度可扩展性。在控制窗口中,用户可以提供基于Active-X的仪表、刻度盘、旋钮和滑动块,以根据需要创建复杂或精美的自定义仪表盘。
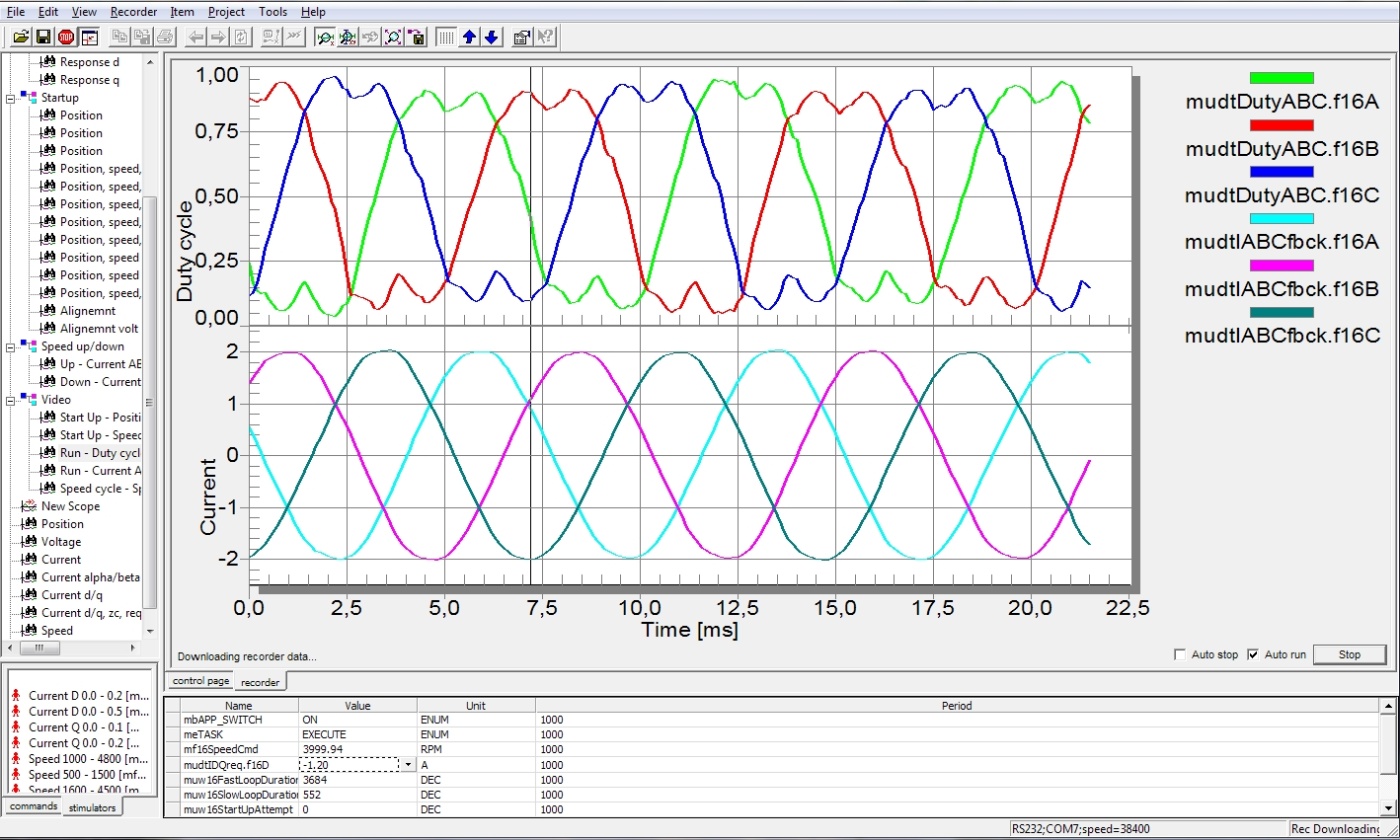
图4 FreeMASTER实时调试、监测和数据可视化工具
飞思卡尔嵌入式软件库(FSLESL)是一个广泛的算法集,专门针对高级电机控制应用的开发。通用功能库(GFLIB)融合了数学、三角函数、查找表和控制功能。这些软件模块是基本的构建单元。电机控制库(MCLIB)涵盖了矢量调制、转换和用于构建数字控制电机驱动器的特定的电机相关功能。通用数字过滤库(GDFLIB)提供了过滤功能,可以实现信号调整。高级控制库(ACLIB)涵盖了实现永磁同步电机无传感器控制的主要功能。
飞思卡尔嵌入式软件库算法进行了高度优化,使用数十万个测试矢量进行了测试,并且提供了良好的文档记录。它们使用可通过C语言调用的函数接口实现,因此十分易于使用。这些库目前可供56800E/EX、ColdFireV1、CortexM4和Power Architecture平台使用。这些算法大大加快了只需创建简单应用的初学者的开发,同时也加快了需要处理复杂的实时动态系统的专业人员的开发,这类系统包括电机控制、电源转换及其他实时嵌入式应用。
总之,由高级无传感器算法控制的三相电机将越来越多地用于各种驱动器,包括家用电器。飞思卡尔提供了一套完整的专用数字信号控制器、丰富的工具链和必要的技术知识,支持在应用中实现这些复杂的控制算法,并快速、高效地实现所需的性能。

pwm相关文章:pwm是什么
c语言相关文章:c语言教程
模数转换器相关文章:模数转换器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
单相异步电动机相关文章:单相异步电动机原理
电流变送器相关文章:电流变送器原理 霍尔传感器相关文章:霍尔传感器原理






评论