基于A3972的步进电机驱动模块设计
系统软件设计
本文引用地址:http://www.eepw.com.cn/article/117154.htm系统软件设计是设计的关键部分,电机每转动一步都是由单片机软件向驱动芯片写入控制字0、控制字1来实现的,所以控制字值的设定是设计的关键,本文还给出一个合理的加速曲线,以解决电机的启动力矩与转速的矛盾。如图7电机正反转流程所示,电机每转动一微步,需要向控制字0写入两路桥电流,而桥电流由6位线性DAC值决定,结合细分值、电流方向和电流衰减模式将DAC值按一定规律写入驱动芯片即可。
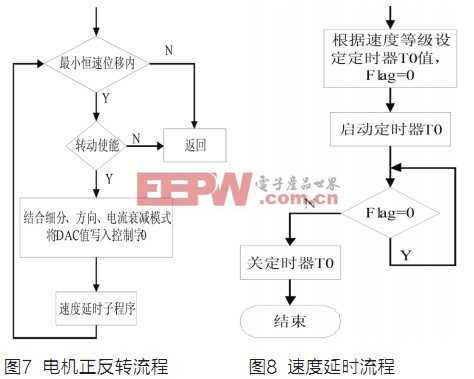
电机启动的加速过程分为5个速度等级,电机启动时设定速度等级SpeedNo为0,以最小恒速位移为单位,逐渐提高速度等级,并通过设置定时器T0的值来作为两个微步之间的时间延时,从而改变步速。图8速度延时流程中Flag为延时结束标志位,定时器T0溢出时置位。
结语
该驱动模块已用于本研究所研发的自动收发卡机项目,驱动42系列两相步进电机,步距角为1.8°,为了进一步提高步进电机定位精度和系统的运行平稳性,采用细分级数为16。从运行的实际情况看,该步进电机驱动器实现了较高的稳速精度,运行可靠,取得了满意的效果。








评论