基于嵌入式处理器的无人机地面控制站设计
3 软件方案
本文引用地址:http://www.eepw.com.cn/article/117109.htm基于硬件方案,运行定制的Windows CE操作系统,编写测控控制台软件,实现对无人机控测遥数据控制和处理。
3.1 WinCE的定制
过微软提供的Platform Builder根据需要定制Windows CE操作系统,具体步骤如下。
新建平台:在platform Builder 平台利用向导上创建一个基于CAYMAN:ARMV4I包的平台。
添加驱动:在PB右边的catalog窗口中选择所要填加的驱动或应用,包括串口驱动等。
删除组件:删除不需要的组件,以减小定制后的操作系统体积。
编译WinCE:得到二进制的image:“nk.bin”和“nk.nb0”。
烧写EBOOT:利用PXA270开发系统JTAG加载程序加载Eboot。
下载运行WinCE镜像:利用Eboot通过以太网下载方式把nk.nb映像文件下载到PXA270平台的的RAM空间执行。
输出SDK:输出定制平台的SDK,用于编写在该平台下运行的测控应用程序。
3.2 测控控制台软件
3.2.1 软件结构
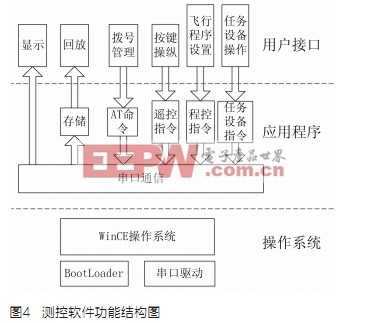
测控主程序在操作系统提供的支撑下,主要功能是由串口通信模块实现数据收发,包括完成遥控指令、程控飞行数据和任务设备控制指令的上传,完成遥测数据及其它下行数据的接收和存储,并向操作人员提供遥测数据显示和回放功能、拨号管理功能、指令输入功能等,软件功能组成和结构如图4所示。
3.2.2 串口通信模块的实现
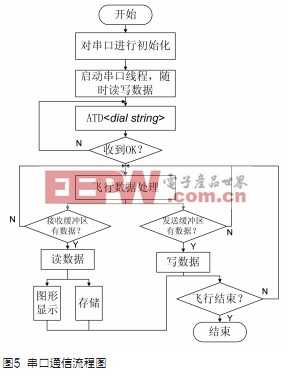
测控程序采用API函数实现串口通讯,通信流程如图5所示。
3.2.3 数据处理和图形显示
数据处理用于对读串口线程得到的数据进行处理,根据与飞行控制器约定的数据格式协议,从数据串中分别取出各种飞行参数到相应的变量中,并调用更新函数更新对应的Edit Control的显示内容。
遥测数据中的俯仰角、滚转角、航向角和高度四个参数,对于无人机飞行状态的判断具有重要作用,为避免占用过多系统资源,采用屏幕绘图动态显示,在更新时仅对成图的关键点进行相应的计算,避免屏闪。

cdma相关文章:cdma原理



评论