轮式自动机器人控制系统
传感器采集模块
本文引用地址:http://www.eepw.com.cn/article/110545.htm传感器采集模块主要采集各种传感器的信息并做初步的处理,采集过程由CPLD控制。此模块在整个系统中十分重要,因为它直接关系到机器人定位的精度。传感器采集模块的组成结构如图2所示。
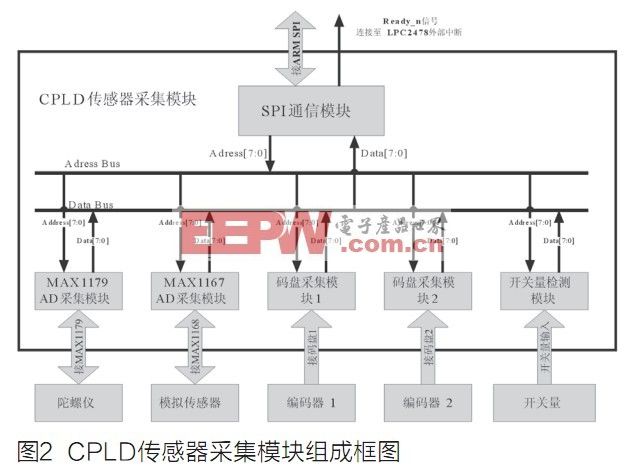
传感器采集模块以CPLD为核心,可以采集多路模拟量、2路编码器脉冲和16路开关量输入。采集模块中各传感器的采集可以并行工作,由于采用了总线的结构和CPLD的可编程特性,采集模块可以很方便地根据具体应用进行裁剪和扩展。各采集模块采集到的信息经过简单的处理后存储在CPLD的内部寄存器中。LPC2478通过SPI来访问寄存器的内容。由于只需要完成通信功能,为了简化设计,仅对时钟极性CPOL为0,且时钟相位CPHA为1时的CPLD从机SPI通信模块进行了设计。
陀螺仪为角速度传感器,安装在机器人的对称轴上,用来感应机器人的角速度。陀螺仪输出的模拟信号由16位并行AD芯片MAX1179转换成数字信号,A/D的采集过程由CPLD控制。使用陀螺仪的主要问题是零位电压漂移问题,CPLD对陀螺仪高速多次采集进行均值滤波以减小这一误差。
机器人的位移传感器采用增量式光电编码器。编码器安装在与主动轮同轴的从动轮上,与从动轮同步转动。使用CPLD对编码器输出脉冲计数,根据脉冲个数来计算机器人位移。
运动控制模块
在陀螺仪精密传感器的导航下,机器人走行电机的速度控制同样要求十分精确。运动控制模块用来精确控制两个走行电机的速度,运动控制模块由运动控制器、直流无刷电机和编码器三个部分组成。主控模块LPC2478通过PWM信号的占空比来控制电机速度,在编码器信号和电机电流的反馈下,运动控制器内部集成的DSP在速度环、电流环和位置环三层闭环精确控制走行电机。
执行动作控制模块
执行动作控制模块控制机器人执行动作,本文设计的机器人主要动作有升降、手臂旋转和抓取还有后部叉取。这些动作主要由舵机和直流电机控制,舵机和直流电机的控制信号都使用PWM信号。执行动作控制模块除了完成电机的驱动,还需要电位器、光电开关等传感器来检测动作的完成情况。虽然LPC2478内部集成12路PWM通道,但按照前面介绍的模块化的设计思想,执行动作控制模块独立设计使系统的结构更加灵活并且容易扩展和剪裁。执行动作控制模块采用NXP的LPC2114微控制器,主控模块LPC2478通过UART发送动作指令,执行动作控制模块控制完成所有动作。LPC2114产生的PWM信号通过H桥电路来驱动电机。












评论