掌上多功能监护呼救定位系统的研制
心电图信号处理
本文引用地址:http://www.eepw.com.cn/article/110407.htmECG信号通过滤波器后经A/D转换为数字信号。虽然,滤波器能够滤除大部分的包括工频和肌电等在内的干扰信号,但是通过最后一级跟随器和系统电源本身耦合进来的工频干扰信号仍然会对信号质量产生不利影响。因此在对心电图信号进行分析得出心律信息之前,需对心电图信号进行数字滤波处理。受实时处理时间间隔的限制,为尽可能缩短滤波所需时间,同时考虑到MXT8051只能支持整数运算,本设计中采用整系数型IIR数字滤波器实现对ECG信号的滤波处理。
该滤波器的频响曲线如图8所示。
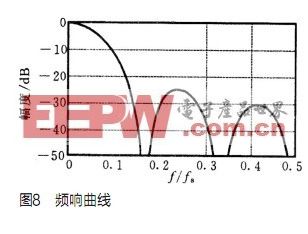
经过该滤波器后,250采样率获得的ECG频谱中高于30Hz的信号已被大大衰减,便于下一步分析心律的处理算法的实现。本设计所用心率分析算法对心电波形进行空间尺度变换后,QRS波群的斜率变化具有显著特征,一般而言QRS波群位置能够检测到连续2~4个峰值,据此对R波进行提取,通过计算RR间期,推算出使用者的心率。
该算法实现时,需构建一个10点的移位寄存器,使心电图采样点数据依次通过该寄存器。通过对该数据链的差分获得该段波形曲线的斜率,然后搜索满足设定阈值的斜率出现后一段时间间隔内的波形曲线中是否出现2~4次满足阈值的斜率曲线,如果发现则认为检测到QRS波群,再通过查找该时间间隔内的绝对极值定位R波。
加速度信号处理
加速度信号的处理目的是获得使用者的身体运动状态变化,从而检测出使用者是否发生了诸如跌倒、强烈碰撞等会对人体产生危害的运动状态的改变。以跌倒为例,单纯考察初始状态和最终状态,可以发现一些固定的模式——初始时人体处于直立状态,跌倒后如果人体受到较大的伤害而无法恢复,大多数情况下人体处于水平状态。基于以上分析,对于跌倒的检测和判断,要求跌倒探测器能够检测到运动状态的变化,同时分析算法能够对变化过程进行分析,并根据分析结果实施报警处理机制。对于其他较为复杂的跌倒过程的监护,可通过报警机制的配合,实现对跌倒探测及危险报警的准确触发。跌倒检测的算法状态机如图9所示。

报警处理
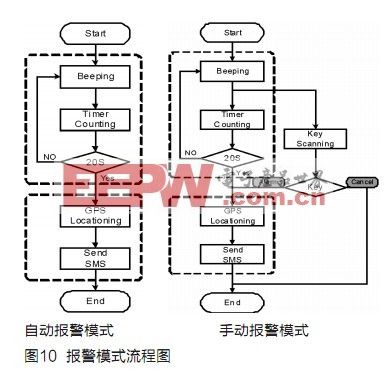
报警处理包含报警控制的操作确认和报警信息的发布。报警控制的操作确认根据基本设计分为自动报警和手动报警两种方式。自动报警模式下,系统在确认发生危急情况时,自动进行延时等待,延时结束后,自动进入报警信息的发布操作;手动报警模式下,使用者可以根据自身情况选择在必要时直接发送报警信息或中断报警处理。图10为自动模式和手动模式下报警处理的流程图。
报警信息需包含:使用者生理信息:心率,姿态;系统配置信息:监护模式,报警模式;理位置;时间信息。
报警信息的格式如表2所示。

报警信息通过CDMA短信的方式发送给接收方,跌倒探测器采用DTGS-800b型CDMA模块,通信控制就是使其能够正常工作的一段例程。DTGS-800b型CDMA模块提供RS232接口, MCU可根据需要通过AT命令实施对通信过程的控制。具体通信例程根据设计需求包括如下项目:
启动CDMA模块——CDMA_work();
启动GpsOne®服务——Gps_Start();
获得GPS空间定位信息——Gps_Position();
发送短信息报警——Send_SMS();
由于通信例程涉及的状态不多,基本是按照上面的顺序进行,因而程序结构比较简单,这里就不再赘述。









评论