基于ADUC7026的数字PID算法在基站功率控制中的应用
PID算法实现
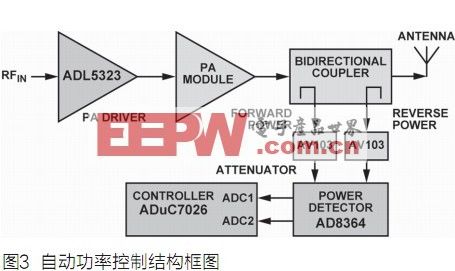
由图3功率控制结构框图可知,实际的输出功率表达式下式:
![]()
根据ADC转换得到的数字电压值转换成采样前的实际输出功率值的表达式如式下:
![]()
其中ADC_Data为ADC的转换结果,2.5V为ADC的参考电压值,4096为12-bit ADC满量程输入值,PdBm_in=20(Vout-0.5)-50是AD8364的传递函数,10dB为耦合器的衰减量。
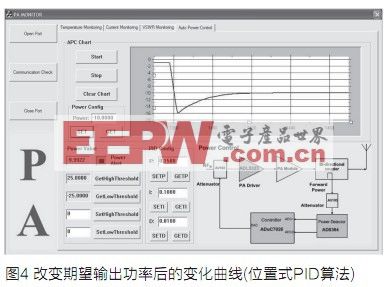
DAC的输出电压由不同PID算法的运算结果和可调衰减器的传递函数决定,下面介绍两种不同PID 算法的流程、程序实现及其测试结果。
位置式PID算法流程
对应图4算法流程图,PID控制部分实现程序如下:










评论